MPU6050 Gyroscope/Accelerometer 使用筆記
MPU6050 Gyroscope/Accelerometer 使用筆記
特性與參數
- 用途:量測姿態
- 精度:
- Gyro : 250/500/1000/2000 dps (degree per second)
- Accel : +-2/4/6/16 g
- 輸出資料:為angular rate(角速度) ,16bit , LSB/g
- 原始感應器電壓VDD(僅有晶片):2.375V-3.46V
- 原始晶片通訊電氣參數:
- Vlogic = 1.8V (+-5%) OR VDD
- VIH(Voltage high level) : 必須超過0.7*Vlogic(MPU6050)
- VIL(Voltage low level):必須低於0.3*Vlogic(MPU6050)
- Ci(Input Capacitance): <5pF
- I2C address: 1101000(when AD0 = 0),1101001(when AD0 = 1)
- I2C最快頻率:400KHZ
- 模組(GY521)電壓:3~5V
- 其他特色:
- 有內建low pass filter可供程式選擇
- 中斷信號選擇
- Auxiliary I2C port可與其他模組串接
- 可作自我校正
- 可透過FSYNC pin與外部模組做synchronization (Gyro)
- On-chip DIgital motion processor
- 有內建FIFO
- 通信方式:I2C(MPU6050,MPU6000)/SPI(MPU6000)
- 晶片datasheet:連結在此
資料單位換算
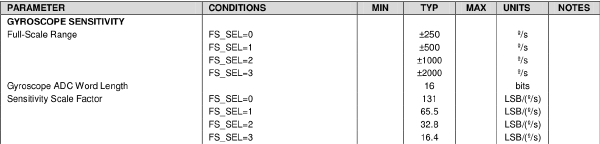
Gyroscope
首先先看下表為MPU6050 datasheet。
最重要的是scale factor。
透過公式
Gyro_value = (Data Register value) / (Scale factor)
其中單位為degree/second
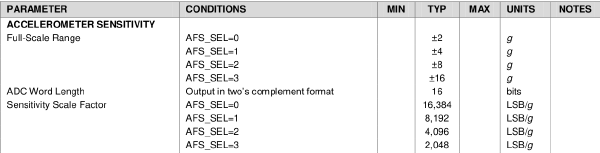
Accelerometer
首先先看下表
一樣,最重要的是scale factor。
透過公式
Accel_value = (Data Register value) / (Scale factor)
其中單位為g
軟體應用方式
Ardunio使用i2cdevlib。運用其中的MPU6050 lib來溝通。其中,可以安裝processing IDE並開啟i2cdevlib的examplelink,這樣你可獲得一個有小飛機形狀的gui,她會呈現感測器的當前姿態。
dsPIC30F也可以使用i2cdevlib,近日有開始支援MPU6050。
而MPU6050的digital motion proccesor是其一大亮點。透過開啟這個功能,你可以透過interrupt直接獲得sensor當前姿態。她會幫你將角加速度轉成角度,這樣你就不用一直輪詢了。(輪詢計算範例:L3G4200)。
Written with StackEdit.