L3G4200 gyroscope使用筆記
L3G4200 gyroscope使用筆記
特性與參數
- 用途:量測姿態
- 精度:250/500/2000 dps (degree per second)
- 輸出資料:為angular rate(角速度) ,16bit
- 原始感應器電壓(僅有晶片):2.4V ~3.6V
- 模組(GY50)電壓:3~5V
- 其他特色:有內建high pass filter和low pass filter可供程式選擇,還有中斷信號選擇
- 通信方式:I2C/SPIs
- 晶片datasheet:連結在此
- 模組(GY50)購買網頁:連結在此
用此模組量測當前姿態方式
軟體部份
Ardunio先安裝wire library和L3G4200D
用這個網站上的code和library即可。
角速度轉成角度
由於該感測器輸出為角速度(離散資料),所以我們須將角速度做離散積分得到角度。
角度 = 初始角度 + (角速度*取樣時間的總和)
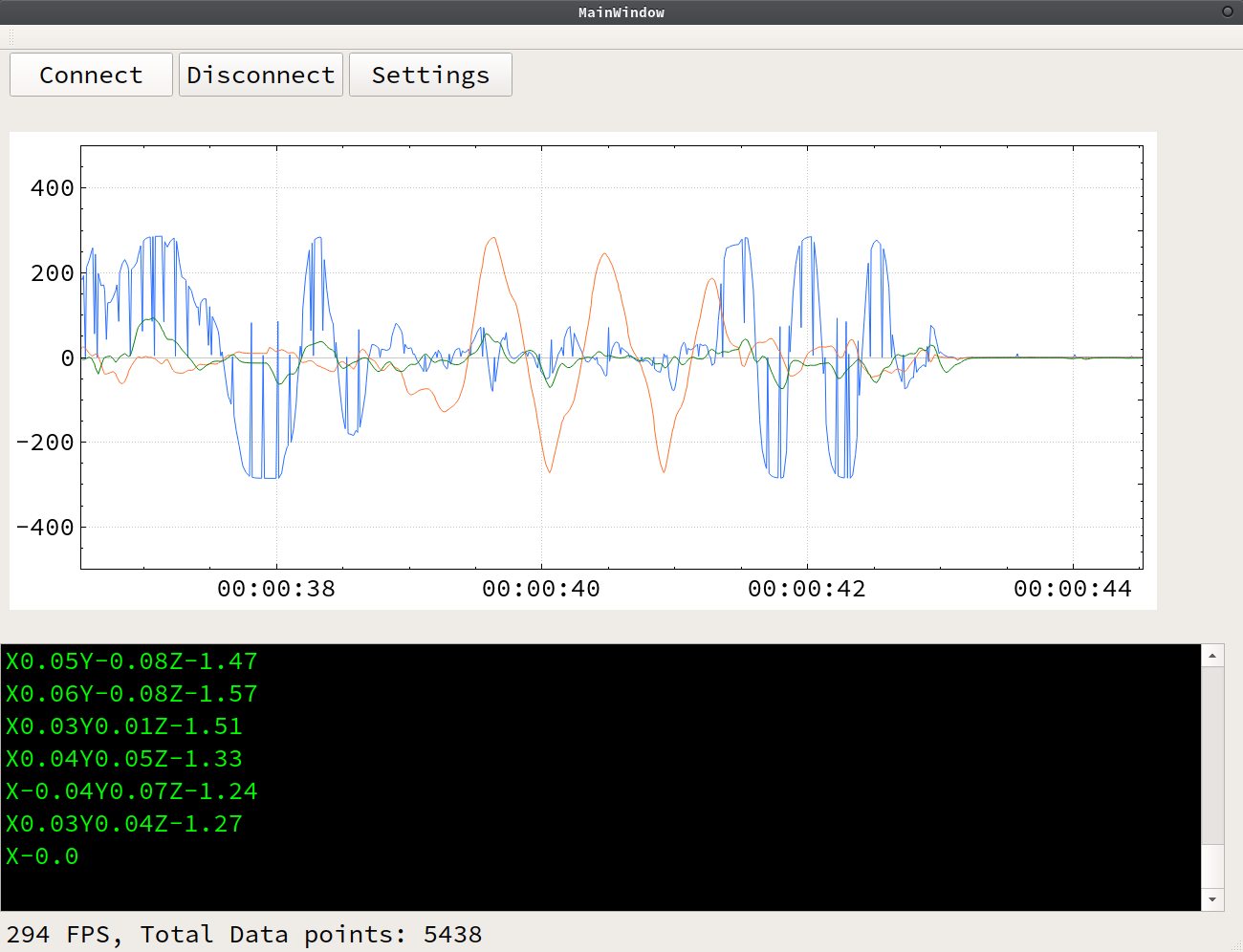
下圖為利用QT自製的視覺化工具。其中若要得到角度責須得到線與0軸的面積。
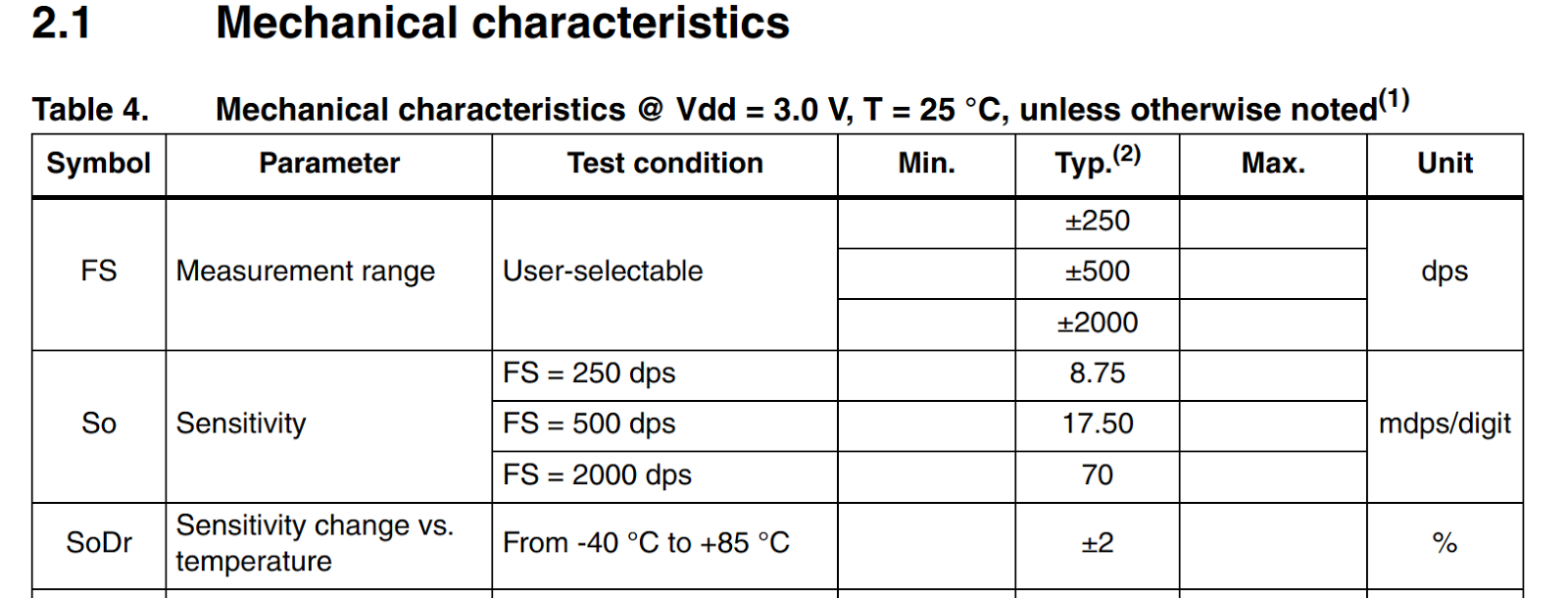
下圖為L3G4200 datasheet p.10 一小部份,其中Sensitivity代表精度,以FS=200dps為例,代表從感測器輸出的數字1代表8.75mdps,如果輸出為兩千時,當前角速度為2000*8.75/1000000dps = 0.0175 dps。
應用限制與誤差處理
由於是作離散積分所以會有誤差,最好使用濾波器(有內建)。
另外由於它需要一直取樣,對Master CPU來說是很大的負擔。
Written with StackEdit.